Motivation
Assume the well is producing q_w of water, q_o of oil and q_g of gas as measured daily at separator with pressure P_s and temperature T_s.
While moving down to depth l along the hole the wellbore pressure P_{wf}(l) will be growing due to gravity of fluid column and friction losses emerging from fluid contact with inner pipe walls .
Wellbore temperature T(l) will be also varying due to heat exchange with surrounding rocks.
The volume shares \{ s_w(l), \, s_o(l), \, s_g(l) \}, occupied by different phases will be varying along hole due to along-hole pressure-temperature variation, phase segregation and phase slippage.
Definition
Mathematical model of Multiphase Wellbore Flow predicts the temperature, pressure and flow speed distribution along the wellbore trajectory with account for:
- tubing head pressure which is controled by gathering system or injection pump
- wellbore design (pipe diameters, pipe materials and inter-pipe annular fillings)
- fluid friction with tubing /casing walls
- interfacial phase slippage
- heat exchange between wellbore fluid and surrounding rocks via complex well design
Consider a 3-phase water-oil-gas flow: \alpha = \{ w, \, o, \, g \}.
The \alpha-phase volumetric flow fraction ( also called phase cut or input hold-up or no-slip hold-up ) is defined as:
| (1) | \gamma_\alpha = \frac{q_\alpha}{q_t} |
where q_\alpha – volumetric flow rate of \alpha-phase and q_t is the total volumetric fluid production rate:
| (2) | q_t = \sum_\alpha q_\alpha = q_w + q_o + g_g |
In multiphase wellbore flow each phase occupies its own area A_\alpha of the total cross-sectional area A of the lifting pipe.
This area can be connected into a single piece of cross-sectional area (like in case of slug or annular flow) or dispersed into a number of connected spots (like in case of bubbly flow).
A share of total pipe cross-section area occupied by moving \alpha-phase is called an \alpha-phase in-situ hold-up and defined as:
| (3) | s_\alpha = \frac{A_\alpha}{A} |
so that a sum of all in-situ hold-ups is subject to natural constraint:
| (4) | \sum_\alpha s_\alpha = s_w + s_o + s_g = 1 |
When word hold-up is used alone it usually means in-situ hold-up and should not be confused with input hold-up or no-slip hold-up which should be better called volumetric flow fraction.
The actual average cross-sectional velocity of moving \alpha-phase is called in-situ velocity and defined as:
| (5) | u_\alpha = \frac{q_\alpha}{A_\alpha} |
where q_\alpha is the volumetric \alpha-phase flowrate through cross-sectional area A_\alpha.
The superficial velocity of \alpha-phase is defined as the
| (6) | u_{s \alpha} = \frac{q_\alpha}{A}= s_\alpha \cdot u_\alpha |
The multiphase mixture velocity is defined as total flow volume normalized by the total cross-sectional area:
| (7) | u_m = \frac{1}{A} \sum_\alpha q_\alpha = \sum_\alpha u_{s \alpha} = \sum_\alpha s_\alpha \cdot u_\alpha |
The difference between velocities of \alpha_1-phase and \alpha_2-phase is called interfacial phase phase slippage:
| (8) | u_{\alpha_1 \alpha_2} = u_{\alpha_1} - u_{\alpha_2} |
The multiphase fluid density \rho_m is defined by exact formula:
| (9) | \rho_m = \sum_\alpha s_\alpha \rho_\alpha |
where \rho_\alpha – density of \alpha-phase.
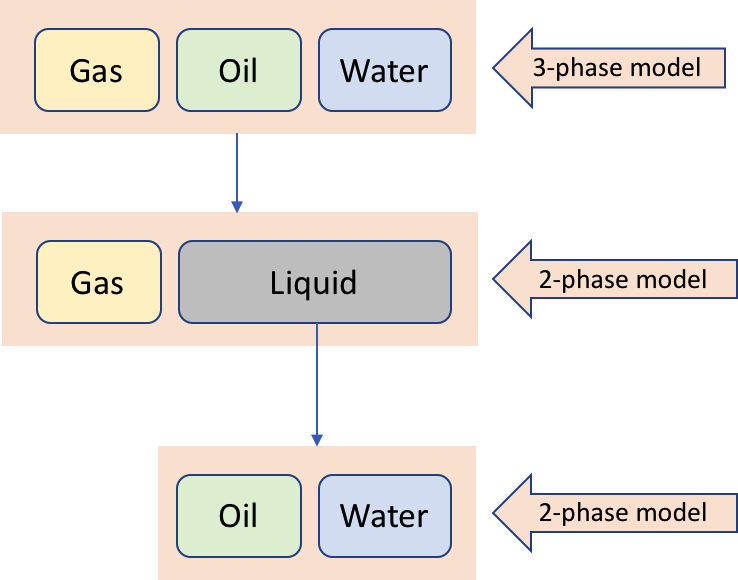
The two-phase gas-liquid model is defined in the following terms:
| (10) | u_m = u_{s g} + u_{s l} = s_g u_g + (1-s_g) u_l |
The two-phase oil-water model is defined in the following terms:
| (11) | u_m = u_{s o} + u_{s w} = s_o u_o + (1-s_o-s_g) u_w |
The 3-phase water-oil-gas model is usually built as a superposition of gas-liquid model and then oil-water model:
Input & Output
| Input | Output |
|---|---|
Ps, \, T_s, \ \{ q_w, q_o, \, q_g \} as values at separator | P(l), \, T(l), \, \{ s_w(l), \, s_o(l), \, s_g(l) \}, \, \{ q_w(l), \, q_o(l), \, q_g(l) \} as logs along hole |
Application
| Activity | Input | Output | ||
|---|---|---|---|---|
| 1 | WPA – Well Performance Analysis | Optimizing the lift performance based on the IPR vs VLP models | Ps, \, T_s, \ \{ q_w, q_o, \, q_g \} as values at separator | P_{wf}(l = l_{datum}) as value at formation datum |
| 2 | DM – Dynamic Modelling | Relating production rates at separator to bottom-hole pressure with VLP | Ps, \, T_s, \ \{ q_w, q_o, \, q_g \} as values at separator | P_{wf}(l = l_{datum}) as value at formation datum |
| 3 | PRT – Pressure Testing | Adjust gauge pressure to formation datum | P_{wf}(l = l_{gauge}) as value at downhole gauge | P_{wf}(l = l_{datum}) as value at formation datum |
| 4 | PLT – Production Logging | Interpretation of production logs | \{ p(l), \, T(l), \, u_m(l), \, s_w(l), \, s_o(l), \, s_g(l) \} as logs along hole | \{ q_w(l), \, q_o(l), \, q_g(l) \} as logs along hole |
| 5 | RFP – Reservoir Flow Profiling | Interpretation of reservoir flow logs | \{ p(l), \, T(l), \, u_m(l), \, s_w(l), \, s_o(l), \, s_g(l) \} as logs along hole | \{ q_w(l), \, q_o(l), \, q_g(l) \} as logs along hole |
Mathematical Model
The multiphase wellbore flow in hydrodynamic and thermodynamic equilibrium is defined by the following set of 1D equations:
| (12) | \frac{\partial (\rho_m A)}{\partial t} + \frac{\partial}{\partial l} \bigg( A \, \sum_\alpha \rho_\alpha \, u_\alpha \bigg) = 0 |
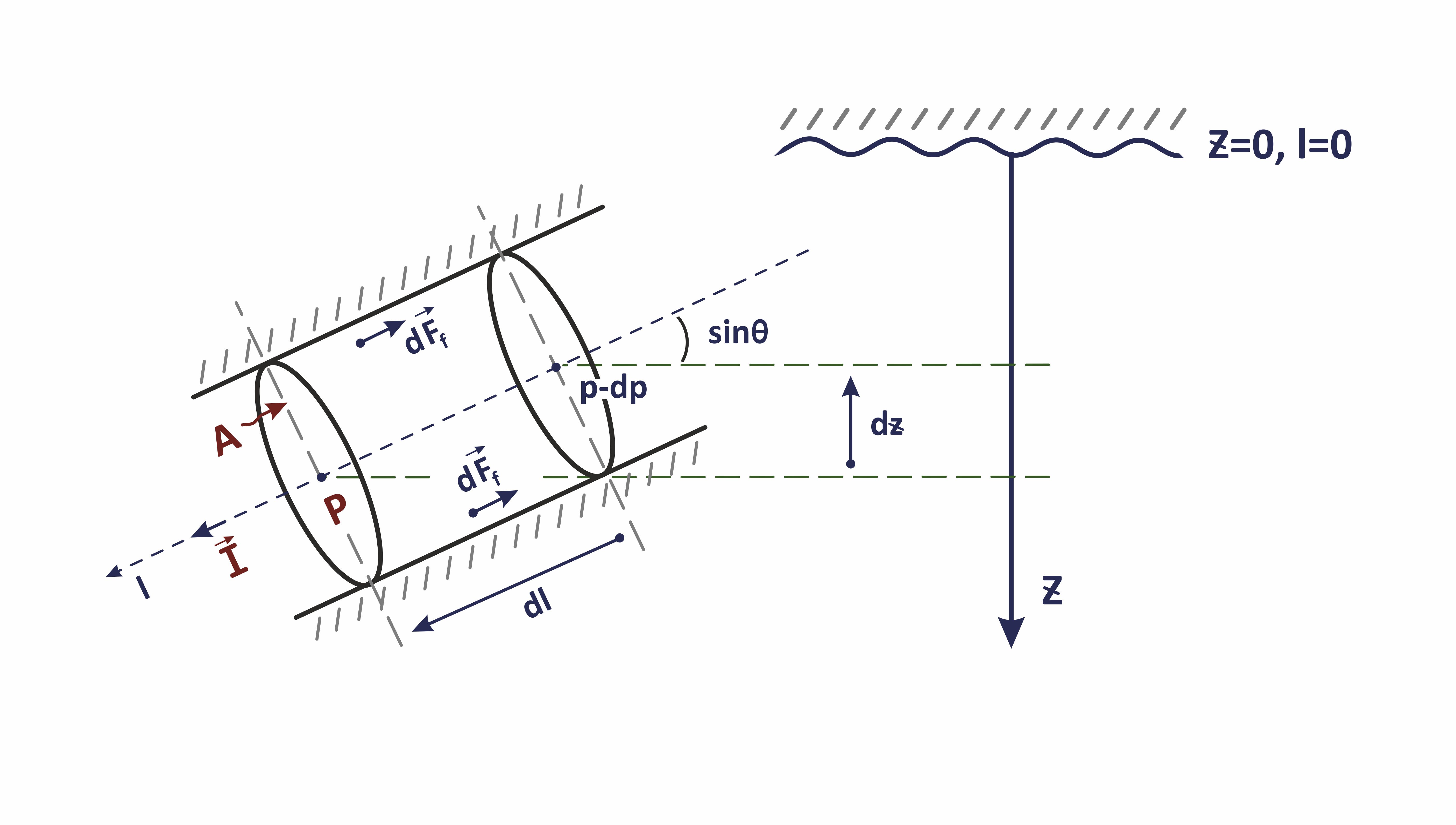
| (13) | \sum_\alpha \rho_\alpha \bigg[ \frac{\partial u_\alpha}{\partial t} + u_\alpha \frac{\partial u_\alpha}{\partial l} - \nu_\alpha \Delta u_\alpha\bigg] = - \frac{dp}{dl} + \rho_m \, g \, \sin \theta - \frac{ f_m \, \rho_m \, u_m^2 \, }{2 d} |
| (14) | (\rho \,c_p)_m \frac{\partial T}{\partial t} - \bigg( \sum_\alpha \rho_\alpha \ c_{p \alpha} \ \eta_{s \alpha}\bigg) \ \frac{\partial p}{\partial t} + \bigg( \sum_\alpha \rho_\alpha \ c_{p \alpha} \ u_\alpha \bigg) \frac{\partial T}{\partial l} \ = \ \frac{1}{A} \ \sum_\alpha \rho_\alpha \ c_{p \alpha} T_\alpha \frac{\partial q_\alpha}{\partial l} |
where
m | indicates a mixture of fluid phases | (t,x,y,z) | time and space corrdinates , z -axis is orientated towards the Earth centre, (x,y) define transversal plane to the z -axis |
\alpha = \{w,o,g \} | water, oil, gas phase indicator | \mathbf{r} = (x, \ y, \ z) | position vector at which the flow equations are set |
measured depth along wellbore trajectory dl^2 = dx^2 + dy^2 + dz^2 starting from tubing head l (x = x_0, \ y=y_0, \ z = z_{THP}) = 0 | volumetric flow rate \alpha-phase fluid at wellbore depth l | ||
u_\alpha(l) | in-situ velocity of \alpha-phase fluid flow | g = 9.81 \ \rm m/s^2 | gravitational acceleration constant |
\rho_\alpha(p, T) | \alpha-phase fluid density at pressure p and temperature T | ||
\rho_m(l) | cross-sectional average fluid density | ||
\theta(l) | wellbore trajectory inclination to horizon | ||
d(l) | cross-sectional average pipe flow diameter | ||
A(l) | in-situ cross-sectional area A(l) = 0.25 \, \pi \, d^2(l) | ||
f_m(u_m) | Darci flow friction coefficient at fluid velocity u_m | \lambda_t(p,T,s_w, s_o, s_g) | effective thermal conductivity of the rocks with account for multiphase fluid saturation |
\nu_\alpha(p,T) | kinematic viscosity of \alpha-phase | \lambda_r(P,T) | rock matrix thermal conductivity |
T_\alpha(l) | temperature of \alpha-phase fluid flowing from reservoir into a wellbore | \lambda_\alpha(P,T) | thermal conductivity of \alpha-phase fluid |
\mu_\alpha(p,T) | dynamic viscosity of \alpha-phase fluid | \rho_r(P,T) | rock matrix mass density |
\eta_{s \alpha}(P,T) | differential adiabatic coefficient of \alpha-phase fluid | ||
c_{pr}(P,T) | specific isobaric heat capacity of the rock matrix | ||
c_{p\alpha}(P,T) | specific isobaric heat capacity of \alpha-phase fluid | ||
\epsilon_\alpha (P, T) | differential Joule–Thomson coefficient of \alpha-phase fluid |
|
| Fig. 1. Wellbore Flow Model geometry |
Equations (12) – (14) define a closed set of 3 scalar equations on 3 unknowns: pressure p(l), temperature T(l) and mixture-average fluid velocity u_m(l) .
The model is set in 1D-model with l-axis aligned with well trajectory l(x,y,z):
The disambiguation of the properties in the above equation is brought in The list of dynamic flow properties and model parameters.
Equation (12) defines the continuity of the fluid components flow or equivalently represent the mass conservation of each mass component \{ m_W, \ m_O, \ m_G \} during its transportation along wellbore.
Equation (13) defines the motion dynamics of each phase (called Navier–Stokes equation), represented as linear correlation between phase flow speed u_\alpha and pressure profile of mutliphase fluid p.
The term
\sum_\alpha \rho_\alpha \ c_{p \alpha} \ u_\alpha \frac{\partial T}{\partial l} represents heat convection defined by the wellbore mass flow.
The term \sum_\alpha \rho_\alpha \ c_{p \alpha} \ \eta_{s \alpha} \ \frac{\partial P_\alpha}{\partial t} represents the heating/cooling effect of the fast adiabatic pressure change.
This usually takes effect in the wellbore during the first minutes or hours after changing the well flow regime (as a consequence of choke/pump operation).
The term (\rho \,c_p)_m defines mass-specific heat capacity of the multiphase mixture and defined by exact formula:
| (15) | (\rho \,c_p)_m = \sum_\alpha \rho_\alpha c_\alpha s_\alpha |
Stationary Flow Model
Stationary wellbore flow is defined as the flow with constant pressure and temperature: \frac{\partial T}{\partial t} = 0 and \frac{\partial P_\alpha}{\partial t} = 0 .
This happens during the long-term (usually hours & days & weeks) production/injection or long-term (usually hours & days & weeks) shut-in.
The temperature dynamic equation (14) is going to be:
| (17) | \sum_\alpha \rho_\alpha \ c_{p \alpha} \ u_\alpha \frac{\partial T}{\partial l} \ = \ \frac{1}{A} \ \sum_\alpha \rho_\alpha \ c_{p \alpha} T_\alpha \frac{\partial q_\alpha}{\partial l} |
The phase temperature T_\alpha is the temperature of the \alpha-phase flowing from reservoir into wellbore.
It carries the original reservoir temperature with heating/cooling effect from reservoir-flow throttling and well-reservoir contact throttling:
| (18) | T_\alpha = T_r + \epsilon_\alpha \, \delta P = T_r + \epsilon_\alpha \, (P_e - P_{wf}) |
The discrete computational scheme for (17) will be:
| (19) | \bigg( \sum_\alpha \rho_\alpha^{k-1} \ c_{p \alpha}^{k-1} \ q_\alpha^{k-1} \bigg) T^{k-1} - \bigg( \sum_\alpha \rho_\alpha^k \ c_{p \alpha}^k \ q_\alpha^k \bigg) T^k = \sum_\alpha \rho_\alpha^k \ c_{p \alpha}^k \ (q_\alpha^{k-1} - q_\alpha^k) \, (T_r^k + \epsilon_\alpha^k \delta p^k ) |
where \delta p^k = p_e^k - p_{wf}^k is drawdown, p_e^k – formation pressure in k-th grid layer, p_{wf}^k – bottom-hole pressure across k-th grid layer, T_r^k – remote reservoir temperature of k-th grid layer.
The l-axis is pointing downward along hole with (k-1)-th grid layer sitting above the k-th grid layer.
If the flowrate is not vanishing during the stationary lift ( \sum_{a = \{w,o,g \}} |q_\alpha^{k-1}| > 0) then T^{k-1} can be calculated iteratively from previous values of the wellbore temperature T^k as:
References
Beggs, H. D. and Brill, J. P.: "A Study of Two-Phase Flow in Inclined Pipes," J. Pet. Tech., May (1973), 607-617
The list of dynamic flow properties and model parameters
(t,x,y,z) | time and space corrdinates , z -axis is orientated towards the Earth centre, (x,y) define transversal plane to the z -axis |
\mathbf{r} = (x, \ y, \ z) | position vector at which the flow equations are set |
l (x, \ y, \ z) | measured depth along wellbore trajectory dl^2 = dx^2 + dy^2 + dz^2 starting from tubing head l (x = x_0, \ y=y_0, \ z = z_{THP}) = 0 |
q_\alpha(t, l) = \frac{d V_\alpha}{dt} | volumetric flow rate
\alpha-phase fluid at wellbore depth
l |
u_\alpha (t, l) | \alpha-phase flow speed at wellbore depth l |
\vec g = (0, \ 0, \ g) | gravitational acceleration vector |
g = 9.81 \ \rm m/s^2 | gravitational acceleration constant |
\rho_\alpha(p,T) | mass density of \alpha-phase fluid |
\mu_\alpha(p,T) | viscosity of
\alpha-phase fluid |
\lambda_t(p,T,s_w, s_o, s_g) | effective thermal conductivity of the rocks with account for multiphase fluid saturation |
\lambda_r(P,T) | rock matrix thermal conductivity |
\lambda_\alpha(P,T) | thermal conductivity of \alpha-phase fluid |
\rho_r(P,T) | rock matrix mass density |
\eta_{s \alpha}(P,T) | differential adiabatic coefficient of \alpha-phase fluid |
c_{pr}(P,T) | specific isobaric heat capacity of the rock matrix |
c_{p\alpha}(P,T) | specific isobaric heat capacity of \alpha-phase fluid |
\epsilon_\alpha (P, T) | differential Joule–Thomson coefficient of \alpha-phase fluid |